




{kind=link}
ACTIVITATS DEL SEGON TRIMESTRE A L’ESCOLETA
05/04/24En aquest segon trimestre hem fet diverses activitats on hem participat conjuntament amb infants de tota l’escola. Durant la setmana de carnaval vam fer un taller de màscares i ens ho vam passar molt bé treballant plegats!
Vam acomiadar el rei Carnestoltes i vam celebrar… Llegeix més»
{kind=link}
Castell de Burriac
02/04/24L’alumnat de Cicle Superior es trasllada a l’Edat Mitjana fent un viatge fins al castell de Burriac. Els infants s’immersen en l’època medieval, explorant les antigues muralles i torres del castell mentre vesteixen vestits autèntics. Convertits en cavallers i dames, recreen escenes de l’Edat Mitjana,… Llegeix més»
1a EDICIÓ REVISTA DIGITAL CM
02/04/24És un plaer comunicar-vos que ja tenim aquí la 1a edició de la Revista Digital elaborada pels i les alumnes de CM. En ella hi podreu trobar un munt d’articles interessants relcionats amb el nostre poble que els súper reporters i reporteres han redactat per… Llegeix més»
INFANTIL VISITA EL COSMOCAIXA
15/03/24El passat dijous 14 de març els infants d’Infantil vam gaudir d’un dia ple d’emocions, començant per anar amb autocar fins a Barcelona, i un cop allà gaudint de les experiències viscudes al Cosmocaixa, amb les activitas d’investigació del Clik, descobrint com eren els dinosaures… Llegeix més»
SORTIDA DE CS A MONTESQUIU
15/03/24L’alumnat de Cicle Superior està treballant les èpoques històriques i, per aquest motiu, hem anat a conèixer el castell de Montesquiu i la seva història. Hem fet un viatge en el temps en un entorn natural privilegiat.
Hem rebut una carta on l’Espadaler de Montesquiu ens… Llegeix més»
La pedagogia del fang
05/03/24Benvolgudes famílies,
aquesta vegada, us volem fer arribar aquest article sobre la pedagogia del fang. Creiem que pot ser del vostres interès!
ARTICLE: LA PEDAGOGIA DEL FANG
Què en penseu? Us llegim!
PREINSCRIPCIÓ 24/25
05/03/24Clikeu l’Enllaç on trobareu la infografia amb els enllaços activats per poder realitzar la preinscripció i tot la informació necessària per a realitzar-la.
CM A LA FUNDACIÓ ALÍCIA
26/02/24El passat dimecres 21 de febrer, els alumnes de cicle mitjà han tingut l’oportunitat única de convertir-se en autèntics xefs per un dia gràcies a una emocionant sortida a la Fundació Alícia. Durant aquesta experiència inoblidable, la classe dels calçots han pogut posar a prova… Llegeix més»
RACONS DE LLENGUA A CM
23/02/24Els alumnes de la classe dels Calçots de CM exploren i aprenen la llengua a través de diverses activitats i propostes que es desenvolupen amb diferents racons a l’aula. Aquests racons ofereixen un entorn d’aprenentatge ric i variat, que permet als infants a interactuar… Llegeix més»
Infància i pantalles
16/02/24Les famílies i tota la comunitat educativa mostra preocupació per l’ús o l’abús de les pantalles que fan nois i noies. Aquesta hiperconnexió en la majoria de casos no és patològica, però fora bo que ens plantegéssim si nosaltres mateixos, els adults, també en patim,… Llegeix més»
SETMANA CARNESTOLTES
15/02/24El dimecres de cendra es dona per finalitzada la setmana més esbojarrada de l’any. Li diem adéu al Rei Carnestoltes i rebem a la Vella Quaresma. Al llarg d’aquest dies passats, hem gaudit de la setmana de carnaval, donant la benvinguda al Rei Carnestoltes… Llegeix més»
ENGLISH THEATRE
13/02/24Avui dimarts dia 13 hem gaudit d’un matí de teatre. Els infants d’EI fins a CI hem pogut veure “The wolf and the seven goats” i els infants de CM i CS han vist “Dorothy’s Dance Camp”, totes dues obres portades a terme… Llegeix més»
DIJOUS LLARDER A SANT BARTOMEU
09/02/24El DIJOUS LLARDER, com és tradició a l’escola ,tots els infants, des de d’I3 fins a 6è, vam anar d’excursió a passar el dia Sant Bartomeu, gaudint de la natura,fent un tastet de butifarra amb pa i visitant el poblat ibèric de Cèllecs.
Aquí teniu… Llegeix més»
CARNESTOLTES’24
05/02/24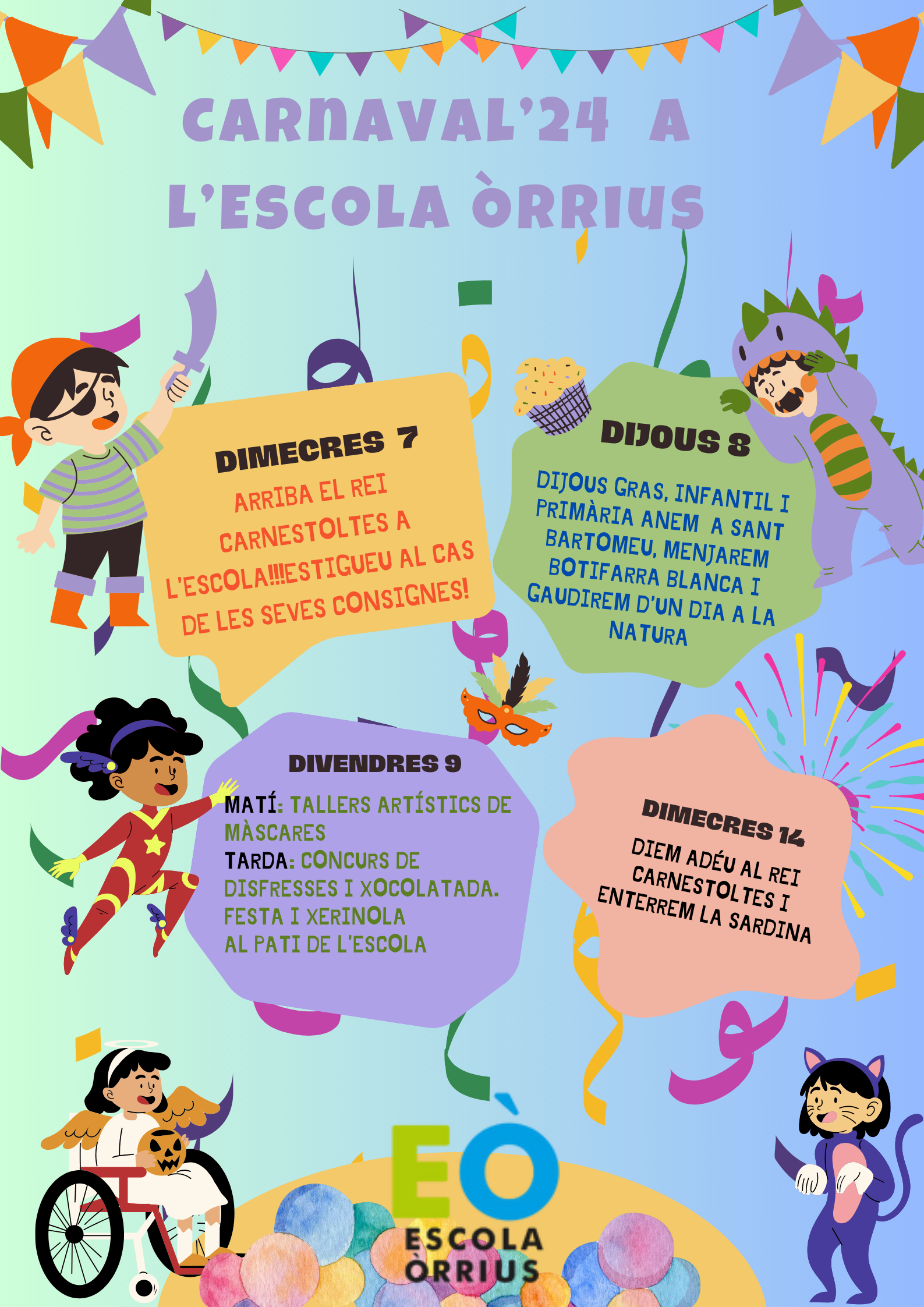{kind=link}
{kind=link}
DIA DE LA PAU I DE LA NO VIOLÈNCIA
02/02/24El passat dimecres 31 de gener a l’escola vam celebrar el dia de la Pau i la no Violència tot gaudint d’una tarda de jocs cooperatius organitzats pel CS.
Aquí us deixem una mostra d’aquesta tarda tan bonica i especial que vam passar.
PORTES OBERTES 2024
01/02/24{kind=link}
I TU, QUÈ MENGES?
29/01/24La classe dels calçots hem estat treballant la piràmide de l’alimentació. Primer vam classificar els aliments segons la freqüència en que creiem que és saludable menjar-los. També els vam classificar segons el tipus d’aliments (fruites, verdures, llegums, carn, peix..). I també hem reflexionat sobre la… Llegeix més»
TARDES D’ESPAIS A INFANTIL
24/01/24A infantil continuem gaudint de les tardes d’espais amb unes propostes on es desenvolupen diferents activitats relalcionades amb la psicomotricitat fina, el pensament lògico-matemàtic, l’expressió oral, l’art, la socialització a través de relacions i de l’entesa entre companys, i un llarg etcètera de situacions d’aprenentatge… Llegeix més»
LA CLASSE DELS CALÇOTS
22/01/24Aquest curs la classe de Cicle Mitjà som la classe dels calçots! Des de principis de curs que ens hem estant informant sobre aquest vegetal i estem tan entusiasmats que, un cop ja vam saber com es planten i com es calcen, vam voler plantar-ne… Llegeix més»
Segueix-nos!